- Industry > Automotive
- Application > Inspection
- Sector > Manufacturing
- #2D3DVisionSystem
- #DefectDetection
- #GearToothInspection
- #NACHIMZ07
- #PrecisionMeasurement
- #QualityImprovement
- #RobotPickingAndSorting
- #VisionInspection
Process Overview
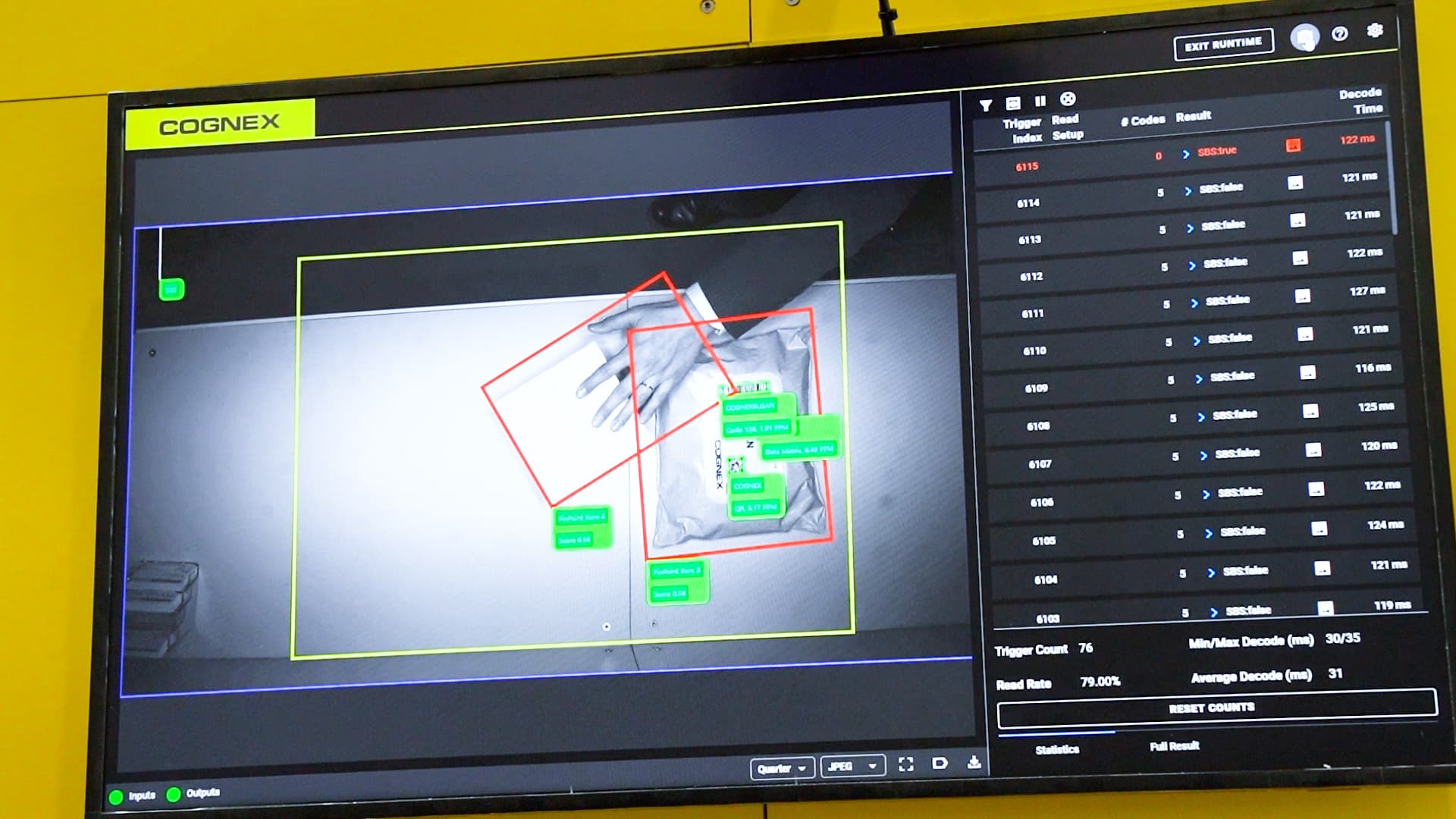
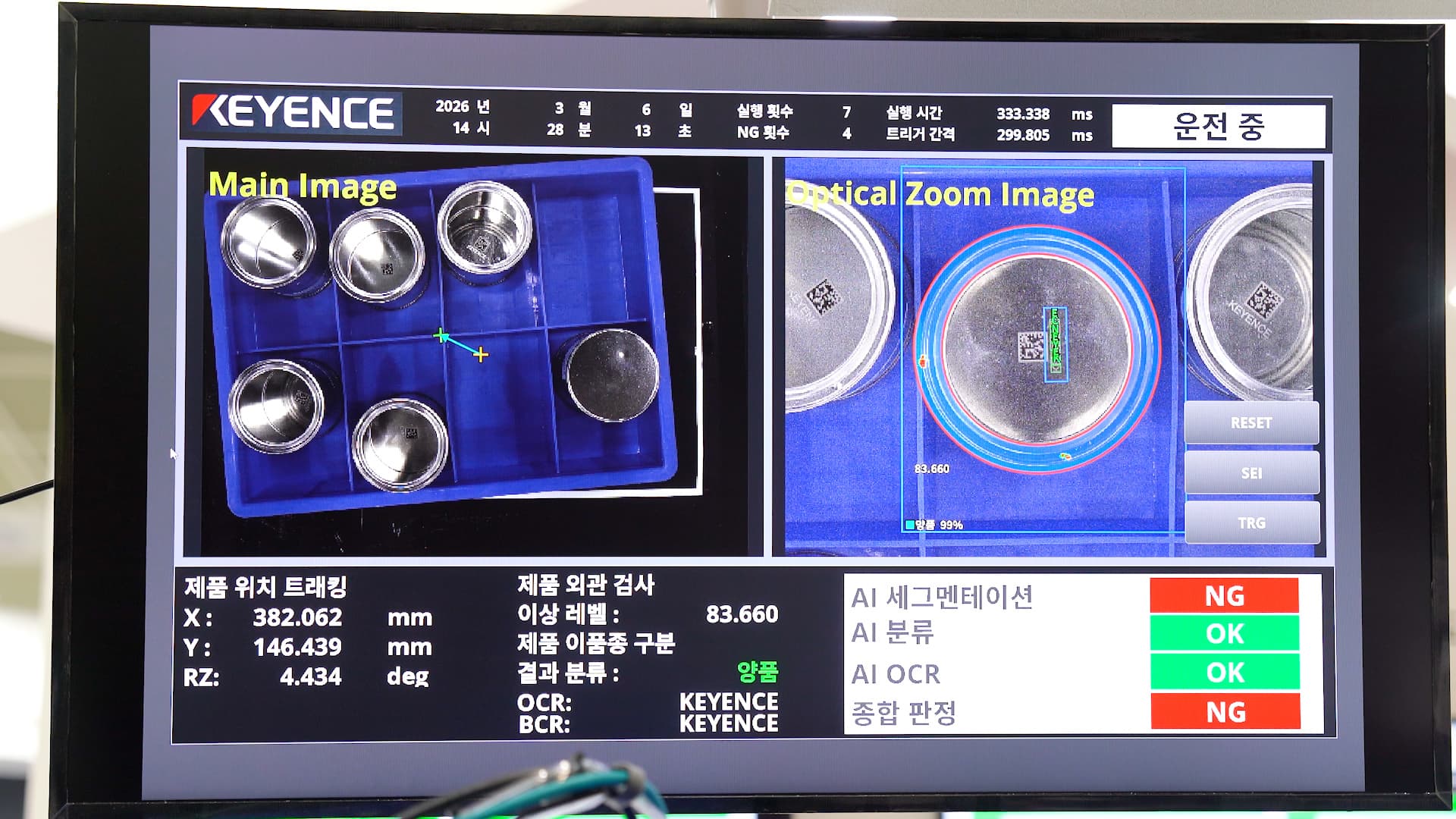
This solution automates gear tooth profile inspection and sorting by combining QRS 2D/3D vision inspection with the NACHI MZ07 robot.
It detects the position of randomly stacked gears, performs shape inspection, and classifies parts into OK/NG automatically.
Since the vision system is developed by QRS, it can be tuned and customized to match on-site requirements, enabling accurate inspection across various product shapes.
Components
- Robot
NACHI MZ07 (6-axis articulated robot)
Payload: 7 kg
Horizontal reach: 723 mm
Weight: 36 kg
Repeatability: ±0.02 mm
IP rating: IP67
- Peripherals
Electric gripper: DH Robotics AG-95
Vision (Distance type): QRS Q3D-IS
Gear position recognition
3.2 MP, 2048 × 1536 pixels
Format: structured light
Scanning range: 176 × 132 ~ 706 × 529 mm
Measurement distance: 300 / 600 / 1200 mm
Detectable: color, shape, position recognition, dimensional measurement
Vision (Tooth profile inspection): QRS Q2D
Deep learning algorithm embedded
Alignment: check product alignment shape and alignment direction
Measurement: measure product shape, length, and weld bead thickness
Inspection: inspect product shape, defects, color, and surface damage
Work cell
Robot base
Inspection result display monitor (QRS)
Workpiece stand
Workflow
- STEP 1.
- 3D vision detects gear position (3D)
- STEP 2.
- Robot picks the detected gear
- STEP 3.
- 2D vision performs OK/NG tooth profile inspection (2D)
- STEP 4.
- Place the part into the designated output position (OK/NG).
※ The content provided by Bigwave Robotics is protected under U.S. and Canadian copyright and intellectual property laws. Unauthorized reproduction, distribution, or use of this content is strictly prohibited.