- Industry > Automotive
- Industry > Machine
- Application > Deburring·Post-processing
- Sector > Manufacturing
- #DustControl
- #HeavyHandling
- #SandBlasting
- #SemiconductorAutomation
- #SputterCarrier
- #SurfaceTreatment
- #WorkEnvironmentImprovement
- #YaskawaRobot
Process Overview
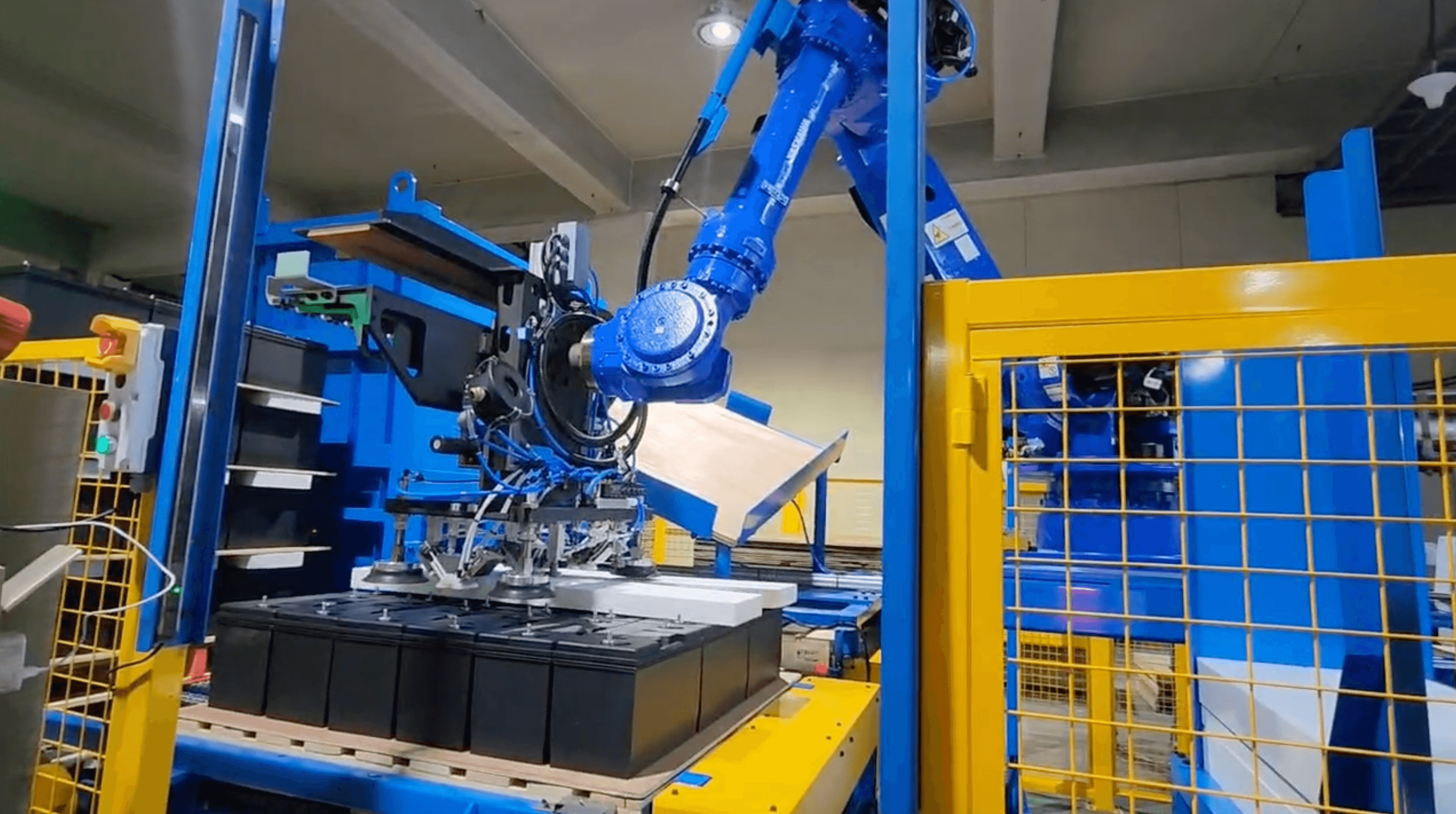
This automation solution uses two Yaskawa robots with pneumatic grippers to handle semiconductor sputter carriers and automate the sand blasting process.
Due to the long shape and heavy weight of the workpiece, the handling task previously required two operators, and the workplace environment was harsh due to dust generated during the sanding process.
By automating the entire workflow from handling to sanding through robotic automation, the solution unmanned the key process and significantly improved the operator working environment.
Components
- Robot
Yaskawa MH180 x 2 units (1 for loading, 1 for sanding process)
6-axis articulated robot
Payload: 180 kg
Working range: 2,702 mm
Weight: 970 kg
Repeatability: ±0.2 mm
- Peripherals
Tool: loading robot pneumatic gripper
Tool: sanding process robot sand blasting tool, dust collector
Peripheral devices: robot mounting base x 2 units
Workpiece infeed/outfeed rack
Sanding fixing jig
Safety fence
Workflow
- STEP 1.
- Load workpiece onto the rack
- STEP 2.
- Loading robot picks and places onto sanding fixing jig
- STEP 3.
- Perform sanding operation
- STEP 4.
- Loading robot picks and flips orientation, then re-loads onto sanding fixing jig
- STEP 5.
- Perform sanding operation for the opposite side
- STEP 6.
- Loading robot unloads finished product and transfers to the rack
※ The content provided by Bigwave Robotics is protected under U.S. and Canadian copyright and intellectual property laws. Unauthorized reproduction, distribution, or use of this content is strictly prohibited.