- Industry > Automotive
- Industry > Machine
- Application > Inspection
- Sector > Manufacturing
- #2DInspection
- #3DVision
- #BinPicking
- #GearToothInspection
- #ManufacturingAutomation
- #RobotSorting
Process Overview
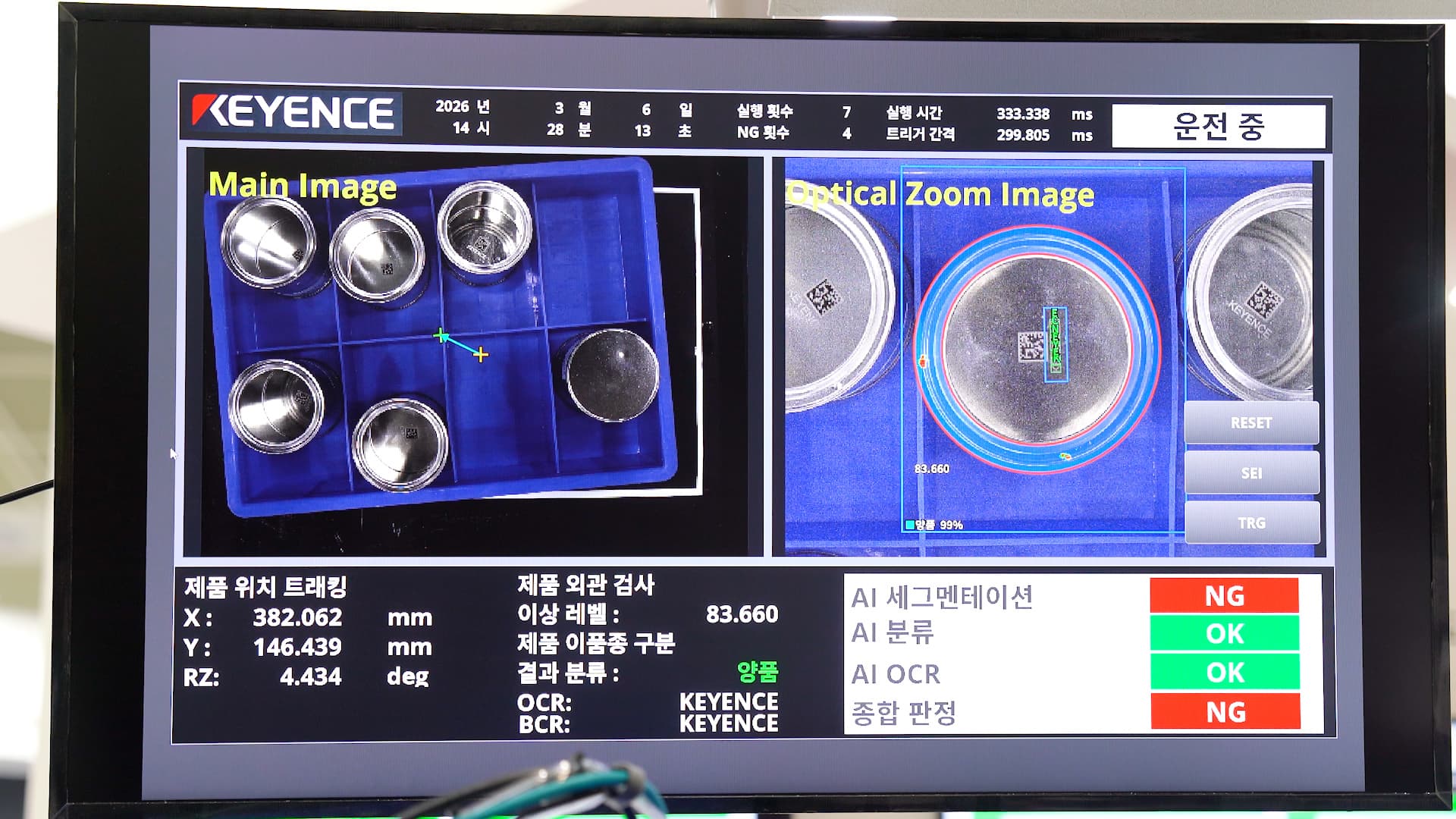
This solution is an automated sorting system that combines QRS 2D/3D vision inspection with a DENSO VS robot to pick randomly placed gears, inspect gear tooth geometry, and separate OK parts from NG parts.
With QRS’s in-house vision technology, the system can be tuned and customized to match specific site conditions, enabling precise inspection across various gear shapes and models.
This project was implemented to automate the inspection process after bin picking.
Components
- Robot
DENSO VS-060
6-axis articulated robot
Payload: 4 kg
Max reach: 605 mm
Weight: 28 kg
Repeatability: ±0.02 mm
Standard cycle time: 0.35 sec
Max tool speed: 9,390 mm/s
Dustproof/clean option available
- Peripherals
Tool: Electric gripper
Vision system: QRS Q3D-IS (near-field type)
Gear position recognition: 3.2MP, 2048 × 1536 pixels
Sensing method: Structured light
Scanning range: 176 × 132 to 706 × 529 mm (area)
Measurement distance: 300 / 600 / 1200 mm
Supports color / shape / edge recognition and image correction
QRS Q2D: 2D inspection (deep learning algorithm included)
Alignment: Sorting and inspection based on product geometry
Measurement: Shape, length, weld bead thickness, and other dimensional measurement available
Inspection: Shape, defects, missing parts, color, sequence inspection available
Compatible robot brands: HYUNDAI, NACHI, EPSON, DENSO, YASKAWA, STAUBLI, FANUC, KUKA, UR, etc.
Work cell, robot base
Inspection result display monitor (QRS)
Sorting rack
Workflow
- STEP 1.
- Detect the target gear in a randomly stacked bin using 3D vision
- STEP 2.
- pick the detected gear and perform OK/NG inspection using 2D vision
- STEP 3.
- unload and sort to designated locations based on the inspection result
※ The content provided by Bigwave Robotics is protected under U.S. and Canadian copyright and intellectual property laws. Unauthorized reproduction, distribution, or use of this content is strictly prohibited.